1. Закон регулирования регуляторов и кривые разгона
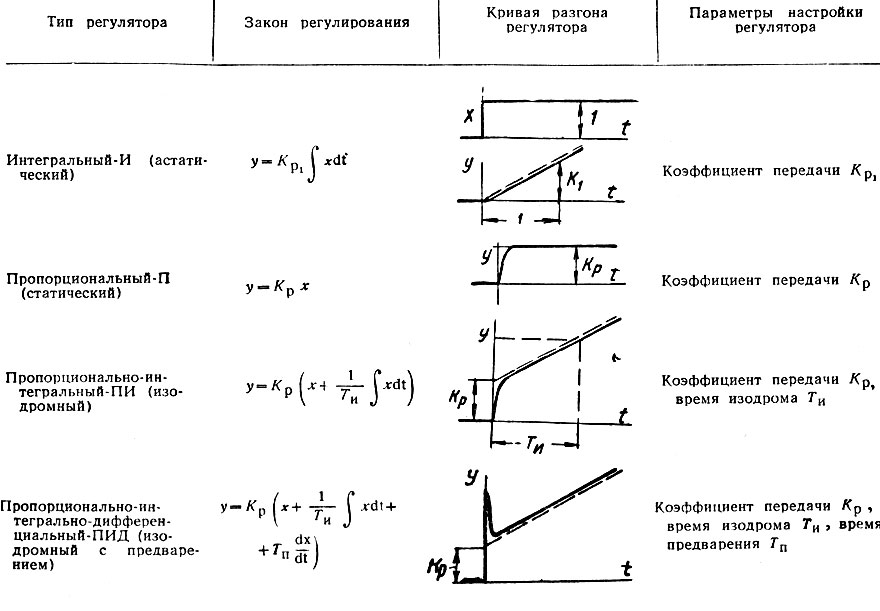
Примечание. Коэффициент передачи регулятора Кр равен перемещению исполнительного механизма (регулирующего органа) за счет пропорционального воздействия в процентах полного хода при единичном отклонении регулируемой величины как это показано на кривых.
Для характеристики пропорционального действия регуляторов пользуются также величиной степени неравномерности
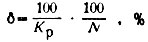
% шкалы измерительного элемента или прибора (здесь N - размах шкалы).
Значения настроек регулятора, производящих получить один из двух оптимальных процессов регулирования (рис. 3), можно рассчитать по формулам таблицы:
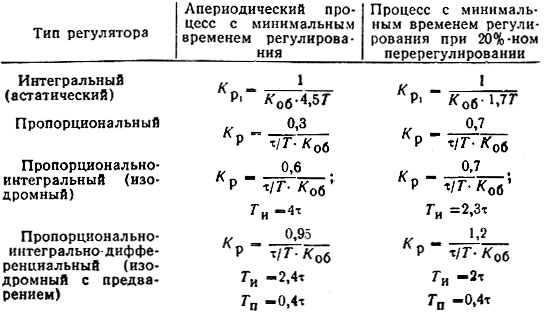
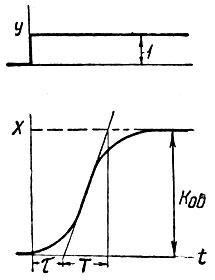
Рис. 3. Оптимальные процессы регулирования: а - апериодический процесс минимальным временем регулирования; б - процесс с 20%-ным перегулированием при минимальном времени регулирования
Предварительно должны быть определены динамические свойства агрегата. Они характеризуются коэффициентом передачи объекта регулирования Kоб, запаздыванием τ и постоянной времени объекта Т, которые могут быть получены по экспериментальной кривой разгона регулируемой величины (рис. 4):
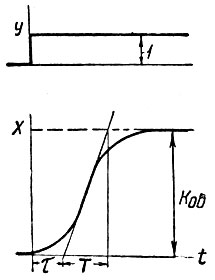
Рис. 4. Кривая разгона объекта регулирования
Способ пользования таблицей вытекает из приведенных ниже примеров расчета настроек регуляторов.
Пример 1. Давление в рабочем пространстве мартеновской печи поддерживается астатическим регулятором.
Параметры объекта, определенные из кривой разгона:

Для того чтобы получить апериодический переходной процесс при регулировании, необходимо установить коэффициент передачи регулятора

Пример 2. Температура горячего дутья доменной печи поддерживается изодромным с предварением регулятором.
Параметры объекта, определенные из кривой разгона:

Для того чтобы получить переходной процесс с 20%-ным перерегулированием, необходимо установить на регуляторе следующие настройки:
Устанавливая на агрегате имеющем определенное отношение запаздывания к постоянной времени τ/T, более сложные регутяторы (см. таблицу, стр 189). можно уменьшить максимальное отклонение x1 в процессе регулирования и время регулирования h.
В отдельных случаях, когда для кривой разгона характерно малое значение отношения запаздывания к постоянной времени объекта τ/T ≤ 0,2 и нет значительных изменений нагрузки агрегата, можно применить более простые, двухпозициснные регуляторы (рис. 5).
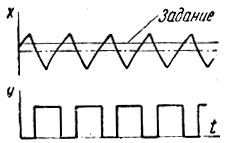
Рис. 5. Процесс регулирования двухпозиционным регулятором
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://metallurgu.ru/ 'Библиотека по металлургии'