§ 106. Расположение подающего механизма
Для полуавтоматической сварки применяются шланговые полуавтоматы толкающего типа (рис. 131), тянущего типа (рис. 132) и тянуще-толкающего типа (рис. 133). Тип полуавтомата определяется местом расположения электродвигателя.
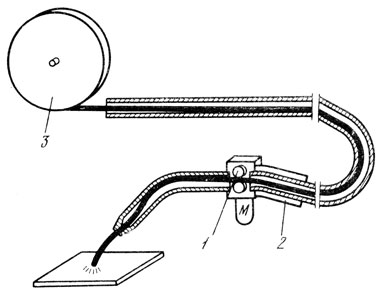
Рис. 132. Схема шлангового полуавтомата тянущего типа: 1 - подающие ролики, 2 - держатель горелки, 3 - катушка с проволокой, 4 - шланг, М - электродвигатель механизма протягивания
Сопротивление прохождению проволоки зависит от количества изгибов шланга, его длины и материала трущихся поверхностей проволоки и канала.
Это сопротивление при работе полуавтомата меняется, что ведет к нарушению равномерности подачи проволоки и стабильности процесса сварки. Сопротивление проталкиванию проволоки может настолько увеличиться, что двигатель механизма подачи остановится или начнется пробуксовка проволоки в подающих роликах.
Для порошковых проволок из алюминия и титана, имеющих повышенный коэффициент трения, сопротивление проталкиванию намного больше, чем для стальных проволок сплошного сечения. Поэтому для снижения сопротивления проталкиванию применяют спирали, изготовленные из материалов с малым коэффициентом трения, или обычные спирали, смазанные нейтральной смазкой (например, дисульфидом молибдена, снижающим сопротивление проталкиванию в 1,5 - 2 раза). Применение спиралей из бронзы снижает сопротивление в 2 - 3 раза по сравнению со сталью, а в трубках из фторопласта - в 6 - 10 раз.
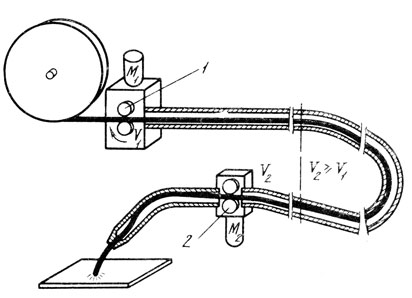
Рис. 133. Схема шлангового полуавтомата тянуще-толкающего типа: 1 - толкающий электродный ролик, 2 - тянущий электродный ролик, 3 - шланг, М1 и М2 - электродвигатели
Для мягких проволок из алюминия и его сплавов или порошковой проволоки с высоким коэффициентом трения (за счет неровностей поверхности проволоки), а также для проволок малого диаметра (менее 0,8 мм), способных сминаться в канале, полуавтоматы толкающего типа неприменимы.
В этих случаях применяют полуавтоматы тянущего типа, механизм подачи которых расположен в горелке. Однако длина шлангов этих полуавтоматов ограничивается малой мощностью электродвигателя (до 100 Вт) и не превышает 1 м. Более длинные шланги требуют увеличенной мощности и массы двигателей, а следовательно, большой массы горелки.
В полуавтоматах со шлангами более 5 м применяются механизмы подачи тянуще-толкающего типа, в которых имеется толкающий механизм с двигателем М1, расположенный рядом с катушкой электродной проволоки, и тянущий механизм с двигателем М2, расположенный в горелке. Это значительно утяжеляет горелку, но устраняет неравномерность подачи проволоки в зону сварки.
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://metallurgu.ru/ 'Библиотека по металлургии'